什么是计算机视觉 计算机视觉(Computer Vision)是一门研究如何使机器“看”的科学,它利用摄像头和计算机算法,让机器能够像人一样“看”,并且能够从中获取信息 。计算机视觉是一门多领域交叉的学科,涉及到计算机科学、数学、物理学、生物学、心理学等多个学科。
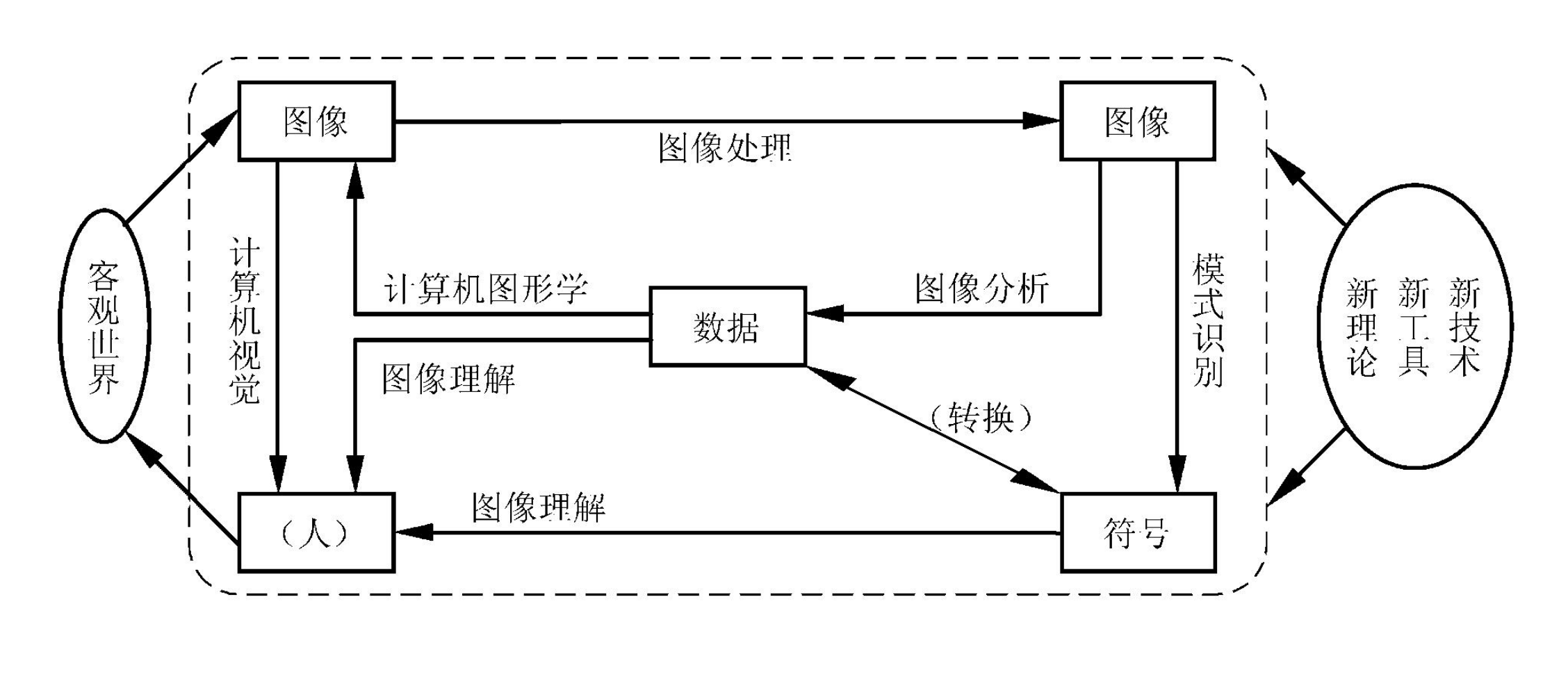
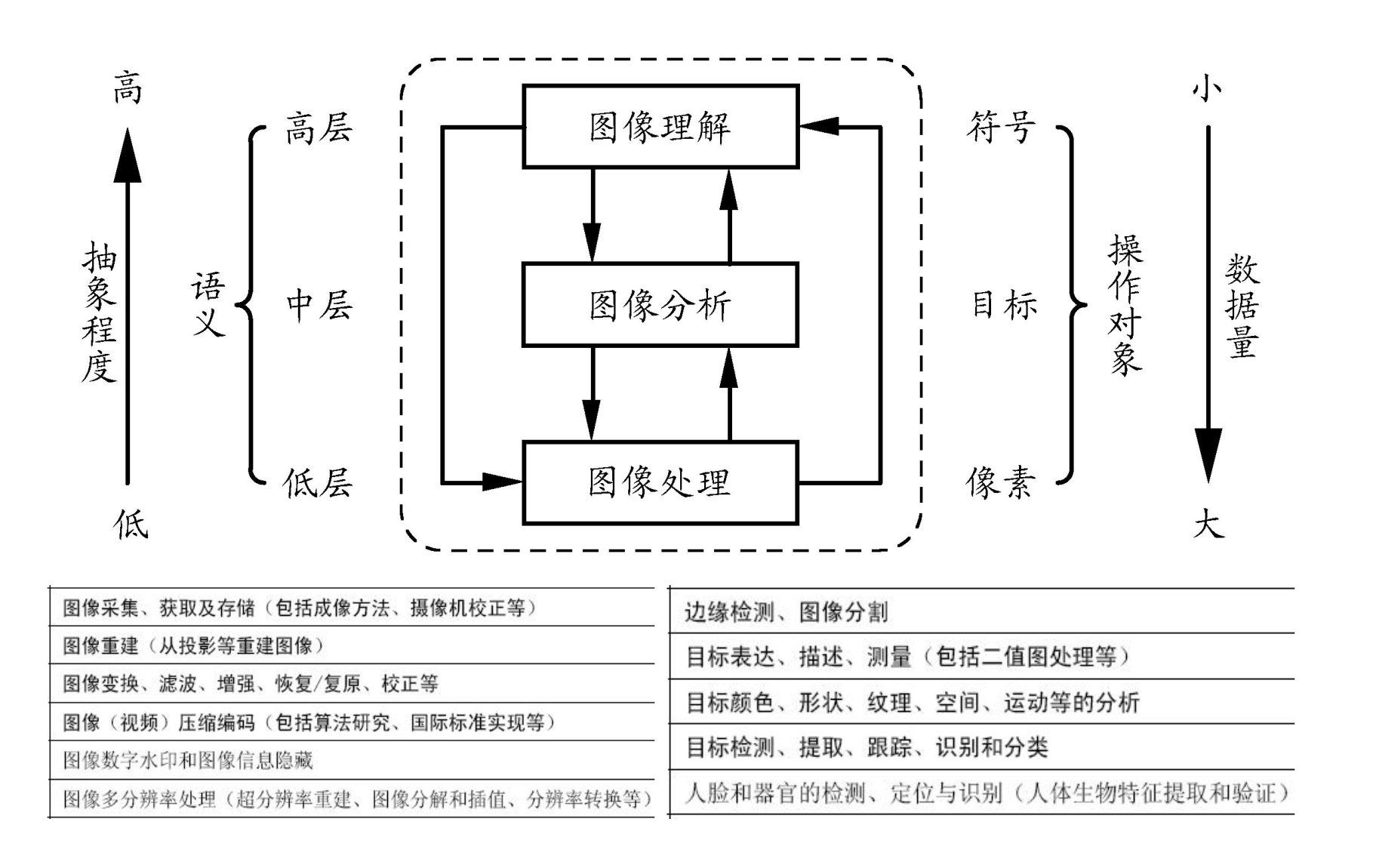
计算机视觉的研究对象是图像,目的是从图像中获取信息。
Q: 从图像中能获取什么信息?
图像 图像的类型 彩色图像 多光谱图像 纹理图像 立体图像 深度图像 3D图像 序列图像 投影重建图像 合成图像
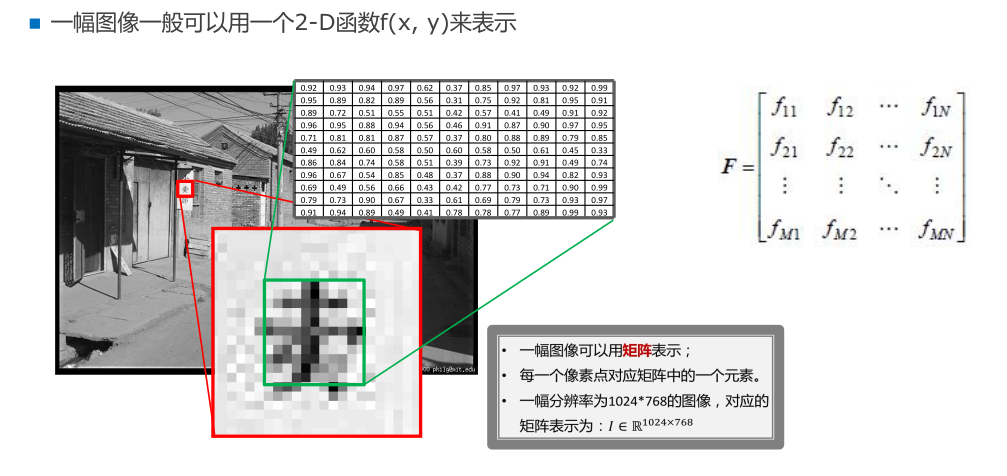
图像的存储方式 图像由像素组成,像素是组成图像的最小单元,每个像素可以看做一个多维向量。
例如,一幅
我们可以把彩色图像看做是三个灰度图像的叠加,每个灰度图像对应一个通道,一般是红、绿、蓝三个通道。
Q: 为什么是红、绿、蓝三个通道?
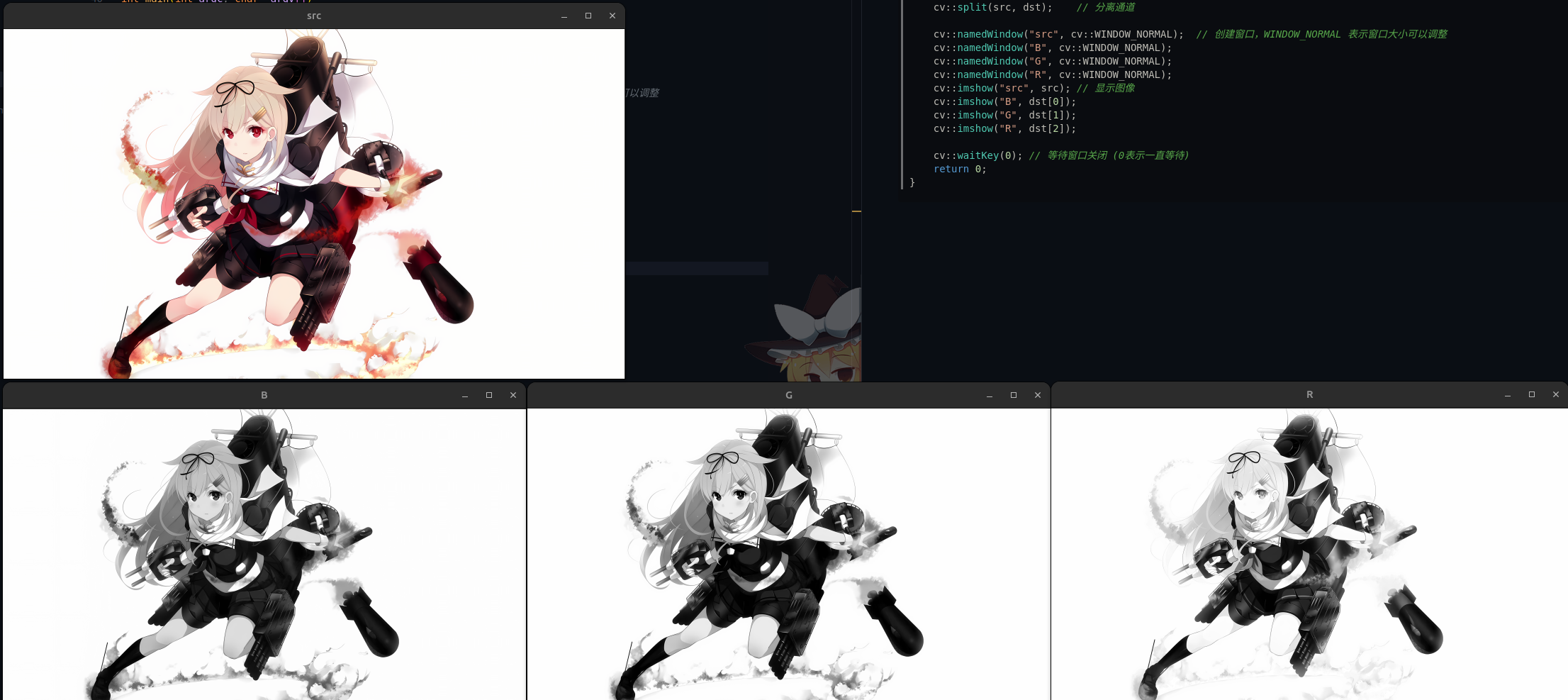
例:分离 RGB 通道(opencv, cpp)。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 #include <opencv2/opencv.hpp> #include <vector> int main (int argc, char * argv[]) cv::Mat src = cv::imread (argv[1 ]); std::vector<cv::Mat> dst; cv::split (src, dst); cv::namedWindow ("src" , cv::WINDOW_NORMAL); cv::namedWindow ("B" , cv::WINDOW_NORMAL); cv::namedWindow ("G" , cv::WINDOW_NORMAL); cv::namedWindow ("R" , cv::WINDOW_NORMAL); cv::imshow ("src" , src); cv::imshow ("B" , dst[0 ]); cv::imshow ("G" , dst[1 ]); cv::imshow ("R" , dst[2 ]); cv::waitKey (0 ); return 0 ; }
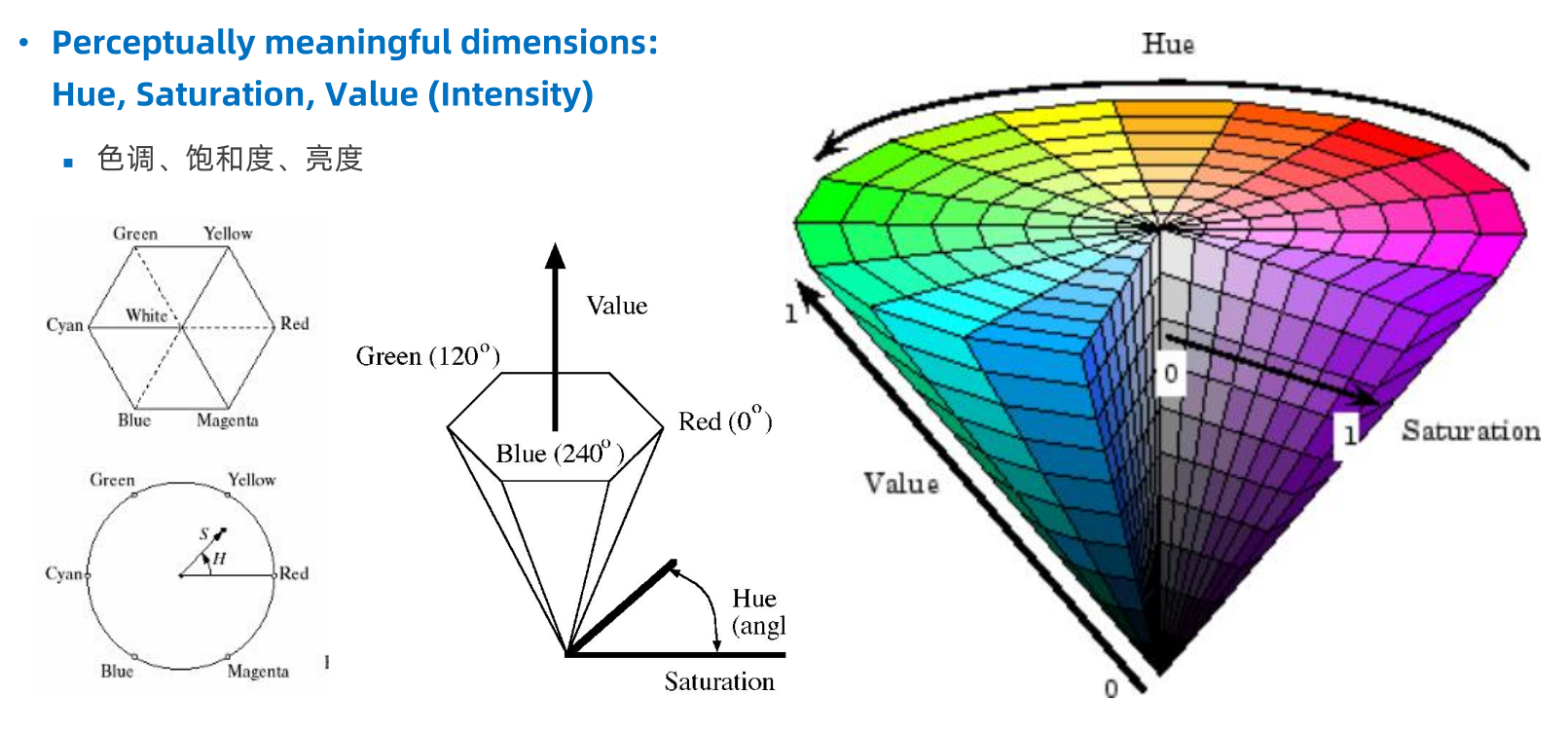
色彩空间 上面提到了 RGB 色彩空间,除了 RGB 色彩空间,还有很多其他的色彩空间,例如 CMY、HSI、HSV 等。不同的色彩空间有不同的特点,适用于不同的场景。
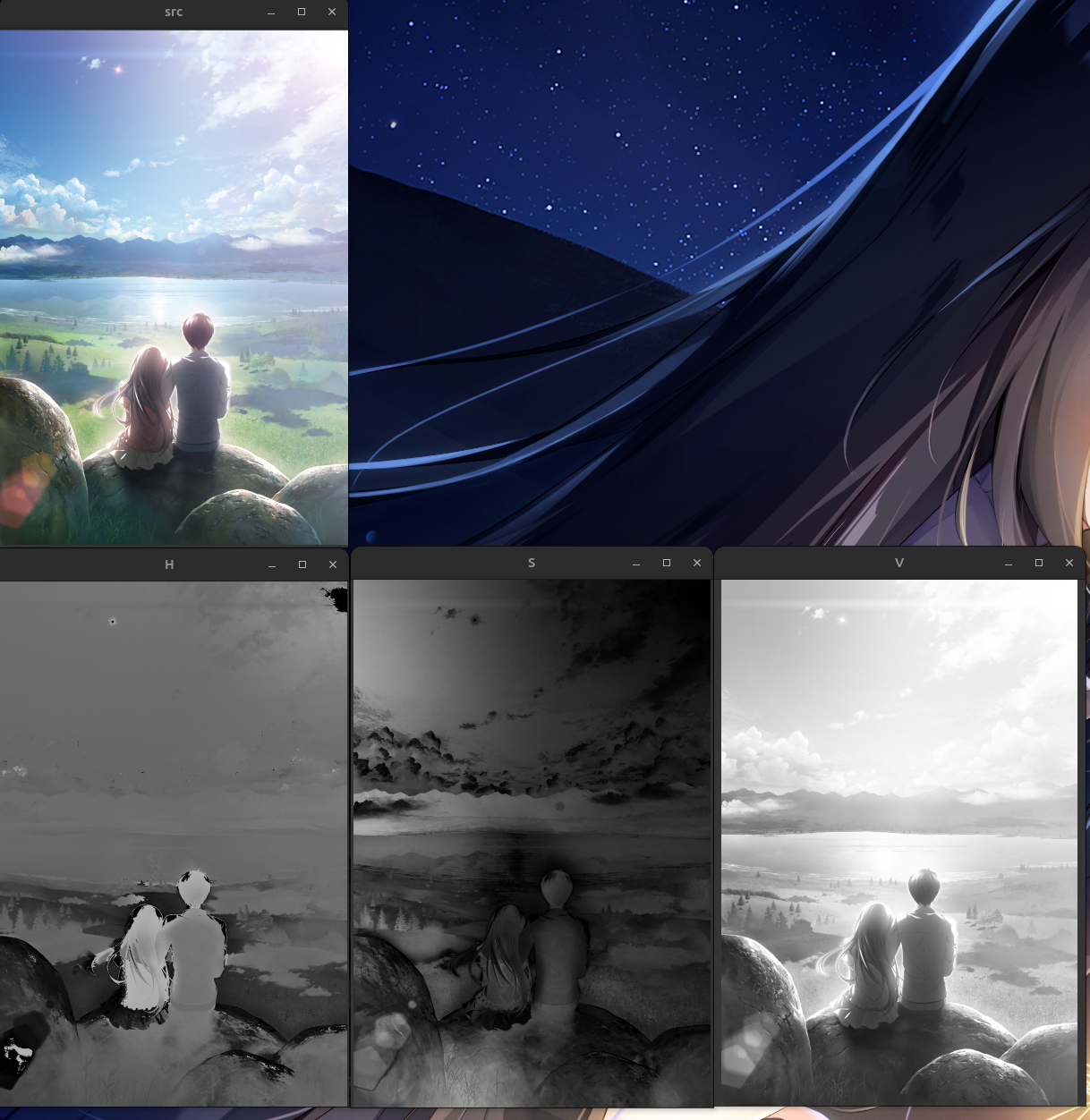
例:RGB 转 HSV 并分离三通道。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 #include <opencv2/opencv.hpp> #include <vector> int main (int argc, char * argv[]) cv::Mat src = cv::imread (argv[1 ]); cv::Mat hsv; std::vector<cv::Mat> dst; cv::cvtColor (src, hsv, cv::COLOR_BGR2HSV); cv::split (hsv, dst); cv::namedWindow ("src" , cv::WINDOW_NORMAL); cv::namedWindow ("H" , cv::WINDOW_NORMAL); cv::namedWindow ("S" , cv::WINDOW_NORMAL); cv::namedWindow ("V" , cv::WINDOW_NORMAL); cv::imshow ("src" , src); cv::imshow ("H" , dst[0 ]); cv::imshow ("S" , dst[1 ]); cv::imshow ("V" , dst[2 ]); cv::waitKey (0 ); return 0 ; }
Q: HSV 相较于 RGB 有什么优势?
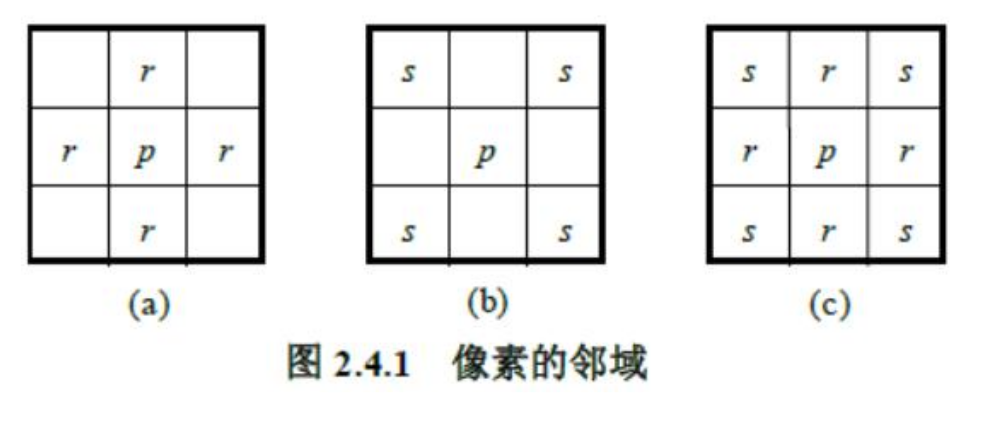
补充:像素的基本操作 邻域
四邻域:上下左右四个像素 对角邻域:左上、右上、左下、右下四个像素 八邻域:四邻域 + 对角邻域
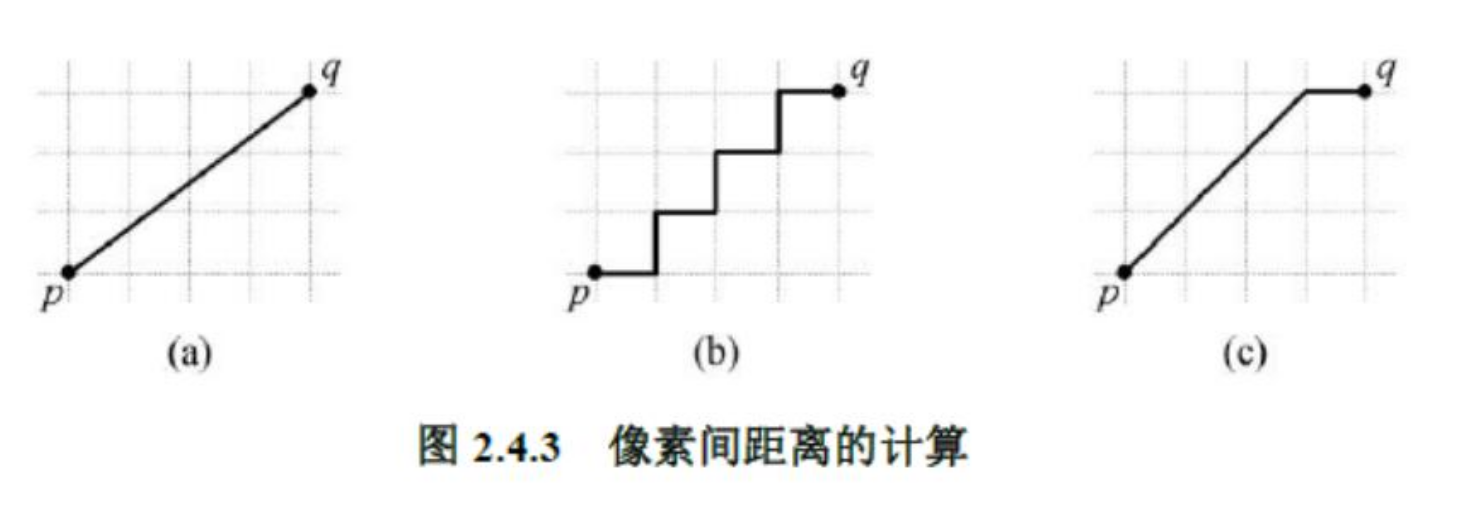
像素的距离
滤波 图像滤波是图像处理中的一种基本操作,它可以使图像变得更加平滑,去除噪声,增强图像的细节等。
卷积 卷积是图像滤波的基础,它是一种数学运算,用于图像处理中的滤波操作。
其数学表达式为:
其中,
例如,下面是一个
例:使用卷积处理图像。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 #include <opencv2/opencv.hpp> int main (int argc, char * argv[]) cv::Mat src = cv::imread (argv[1 ]); cv::Mat dst; cv::Mat kernel; kernel = (cv::Mat_ <float >(3 , 3 ) << 0 , -1 , 0 , -1 , 4 , -1 , 0 , -1 , 0 ); cv::filter2D (src, dst, -1 , kernel); cv::namedWindow ("src" , cv::WINDOW_NORMAL); cv::namedWindow ("dst" , cv::WINDOW_NORMAL); cv::imshow ("src" , src); cv::imshow ("dst" , dst); cv::waitKey (0 ); return 0 ; }
常见滤波器 均值滤波
均值滤波是一种最简单的滤波器,它将每个像素的值替换为其邻域像素的平均值。
中值滤波
中值滤波是一种非线性滤波器,它将每个像素的值替换为其邻域像素的中值。
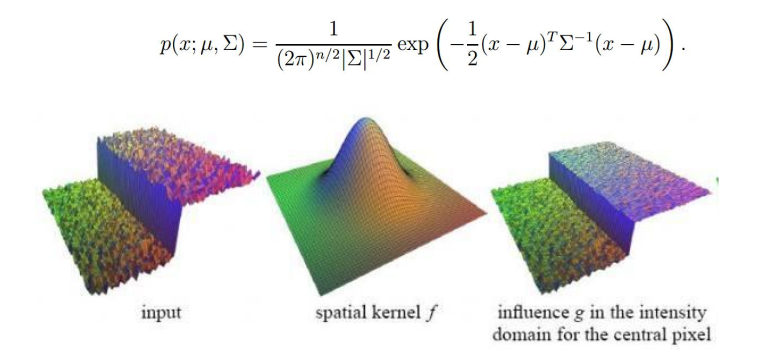
高斯滤波
高斯滤波是一种线性滤波器,它将每个像素的值替换为其邻域像素的加权平均值。
先按照公式计算权重,然后归一化到和为1。
锐化滤波
锐化滤波是一种增强图像细节的滤波器,它强调与局部平均之间的差异。
当然,卷积核不一定是
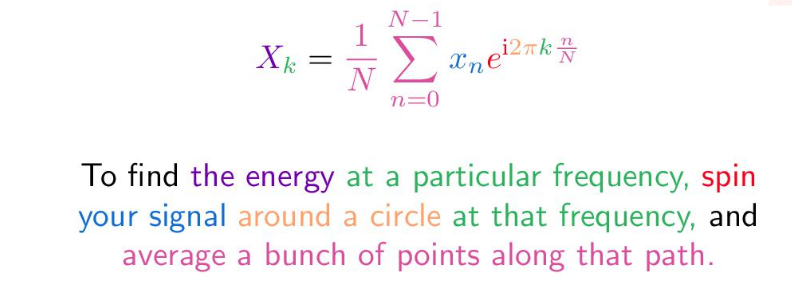
补充:频域 傅里叶变换是一种信号处理中常用的方法,它可以将信号从时域转换到频域,从而更好地理解信号的特征。
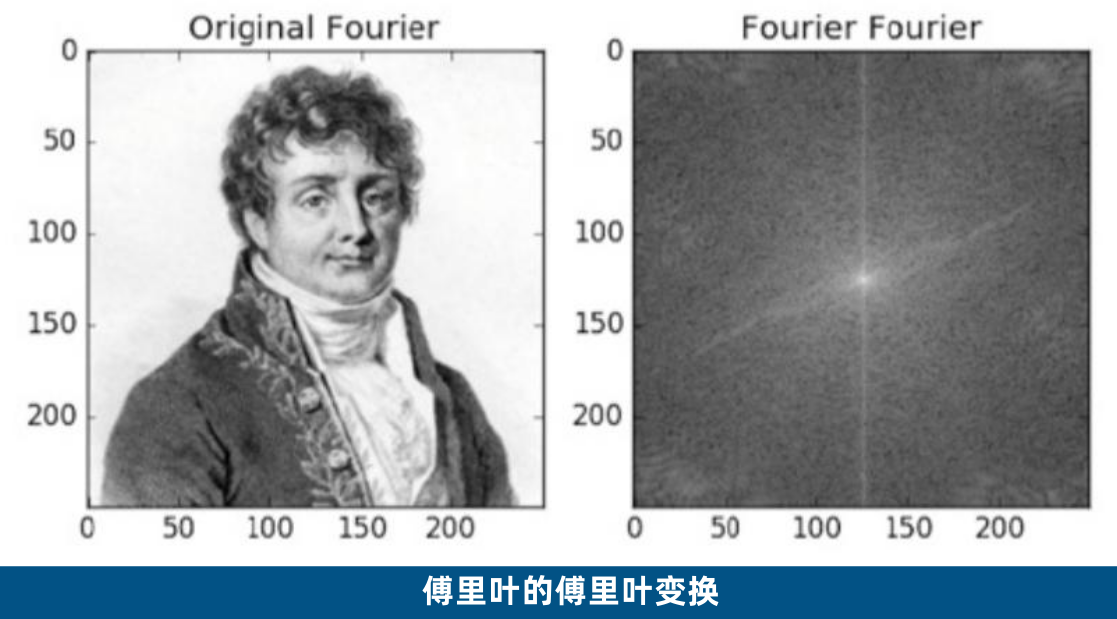
将图像看做是一个二维信号,我们可以对图像进行傅里叶变换,得到图像的频谱:
例如:
FFT的结果是复数形式,保留了图像的全部信息,但去绝对值得到的频谱图只表现了振幅而没有体现相位。
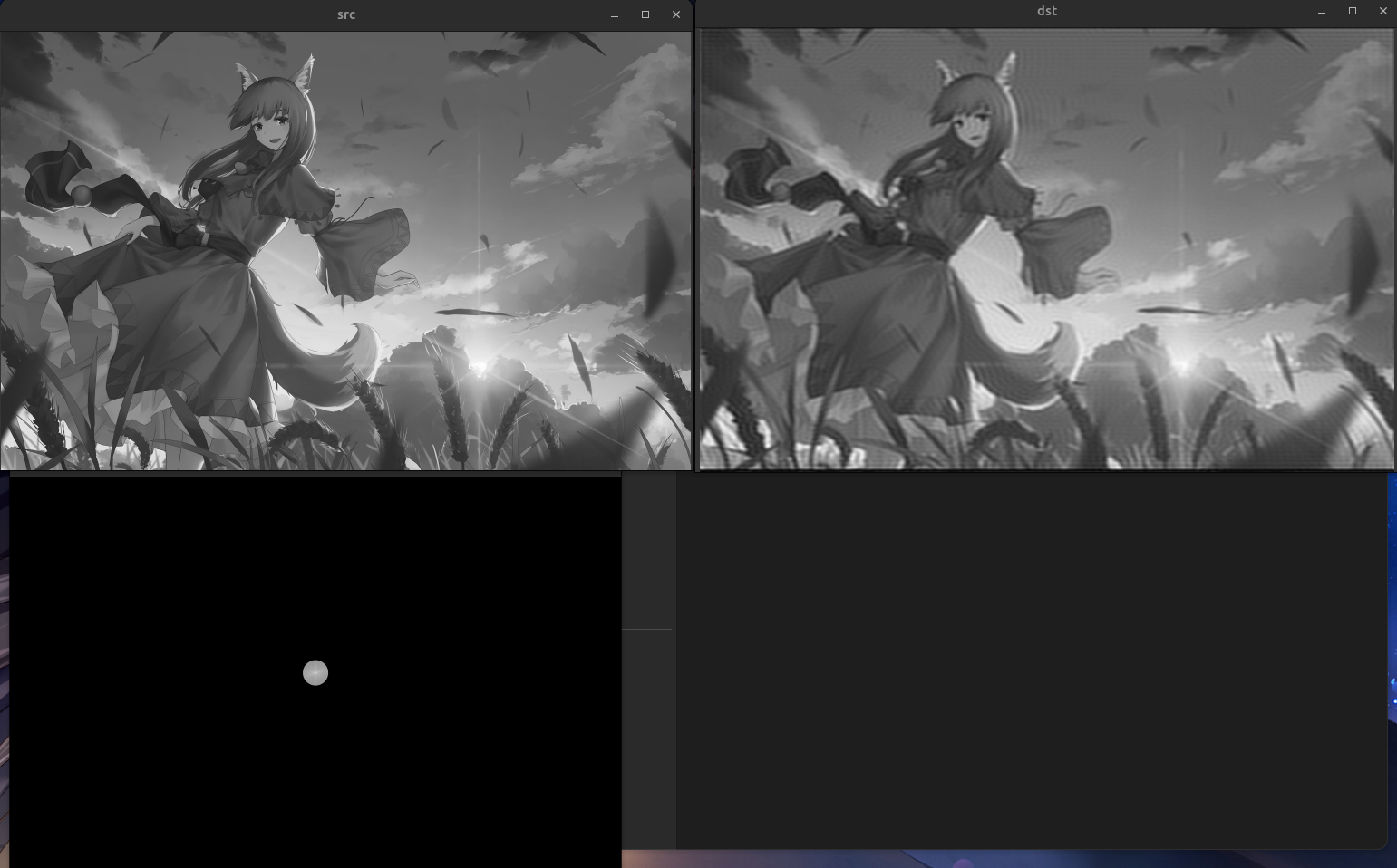
在频域中,我们可以对图像进行滤波,然后再进行逆变换,得到滤波后的图像。
例:使用 DFT 进行频域低通滤波。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 #include <opencv2/opencv.hpp> int main (int argc, char * argv[]) cv::Mat src = cv::imread (argv[1 ]); cv::Mat dst; cv::Mat padded; cv::Mat complexI; cv::cvtColor (src, src, cv::COLOR_BGR2GRAY); src.convertTo (padded, CV_32F); int m = cv::getOptimalDFTSize (padded.rows); int n = cv::getOptimalDFTSize (padded.cols); cv::copyMakeBorder (padded, padded, 0 , m - padded.rows, 0 , n - padded.cols, cv::BORDER_CONSTANT, cv::Scalar::all (0 )); cv::dft (padded, complexI, cv::DFT_COMPLEX_OUTPUT); cv::Mat q0 = complexI (cv::Rect (0 , 0 , complexI.cols / 2 , complexI.rows / 2 )); cv::Mat q1 = complexI (cv::Rect (complexI.cols / 2 , 0 , complexI.cols / 2 , complexI.rows / 2 )); cv::Mat q2 = complexI (cv::Rect (0 , complexI.rows / 2 , complexI.cols / 2 , complexI.rows / 2 )); cv::Mat q3 = complexI (cv::Rect (complexI.cols / 2 , complexI.rows / 2 , complexI.cols / 2 , complexI.rows / 2 )); cv::Mat tmp; q0. copyTo (tmp); q3. copyTo (q0); tmp.copyTo (q3); q1. copyTo (tmp); q2. copyTo (q1); tmp.copyTo (q2); int radius = 100 ; cv::Mat lowPass = cv::Mat::zeros (complexI.size (), CV_32FC2); cv::Point center = cv::Point (lowPass.cols / 2 , lowPass.rows / 2 ); cv::circle (lowPass, center, radius, cv::Scalar (1 ), -1 ); cv::mulSpectrums (complexI, lowPass, complexI, 0 ); cv::namedWindow ("complexI" , cv::WINDOW_NORMAL); cv::Mat plane[] = { cv::Mat::zeros (complexI.size (), CV_32F), cv::Mat::zeros (complexI.size (), CV_32F) }; cv::split (complexI, plane); cv::magnitude (plane[0 ], plane[1 ], plane[0 ]); cv::log (plane[0 ] + cv::Scalar::all (1 ), plane[0 ]); cv::normalize (plane[0 ], plane[0 ], 0 , 1 , cv::NORM_MINMAX); cv::imshow ("complexI" , plane[0 ]); q0. copyTo (tmp); q3. copyTo (q0); tmp.copyTo (q3); q1. copyTo (tmp); q2. copyTo (q1); tmp.copyTo (q2); cv::idft (complexI, dst, cv::DFT_SCALE | cv::DFT_REAL_OUTPUT); cv::normalize (dst, dst, 0 , 255 , cv::NORM_MINMAX); dst.convertTo (dst, CV_8UC1); cv::namedWindow ("src" , cv::WINDOW_NORMAL); cv::namedWindow ("dst" , cv::WINDOW_NORMAL); cv::imshow ("src" , src); cv::imshow ("dst" , dst); cv::waitKey (0 ); return 0 ; }
Q: 高通滤波?
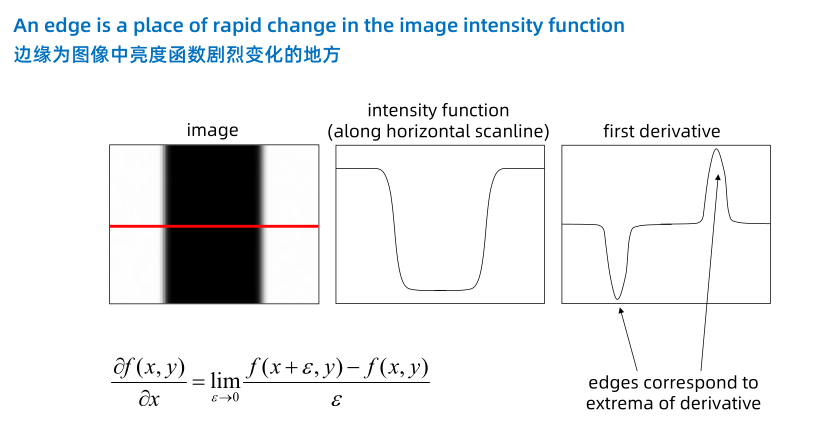
边缘检测 边缘检测是图像处理中的一种基本操作,它可以检测图像中的边缘,从而提取出图像的轮廓。
卷积微分 图像中的边缘可以看做是图像灰度的突变,因此我们可以通过对图像进行微分来检测边缘。
下面给出二维图像的偏导:
上述公式推导过程简单,这里不再赘述。由此,我们可以得到一维卷积核:
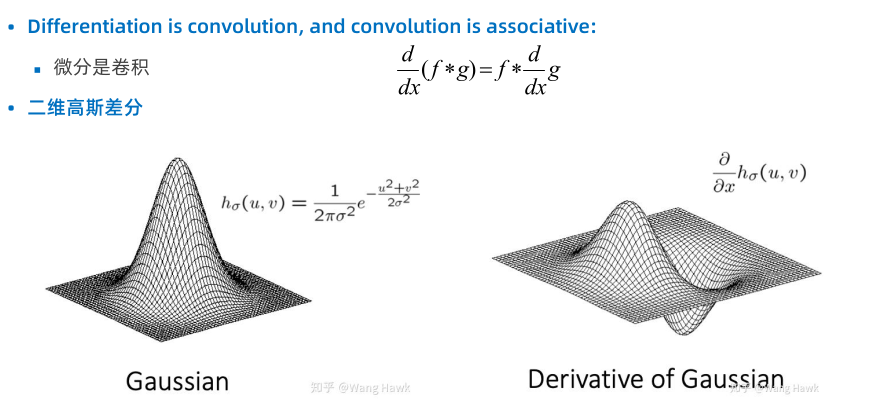
直接对图像求导会受到噪声的干扰,因此一般需要对图像先做一次平滑,减少噪声的干扰,再做求导。
Sobel 算子 Sobel 算子是一种常用的边缘检测算子,它是一种线性滤波器,可以检测图像中的水平和垂直边缘。
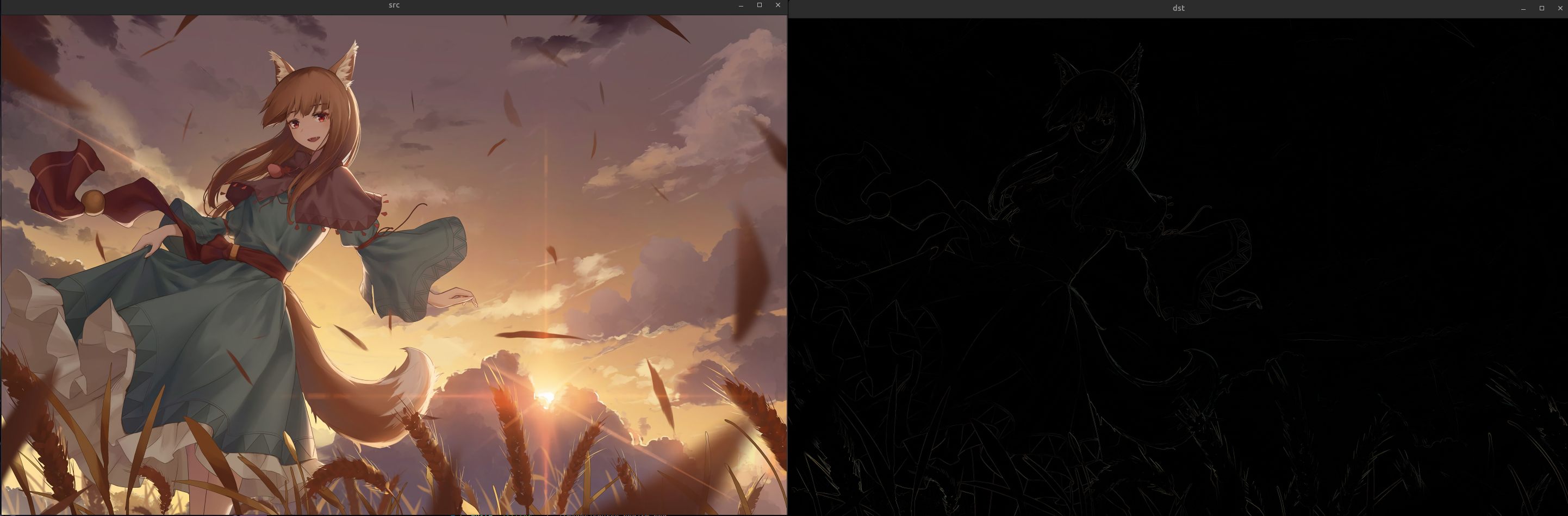
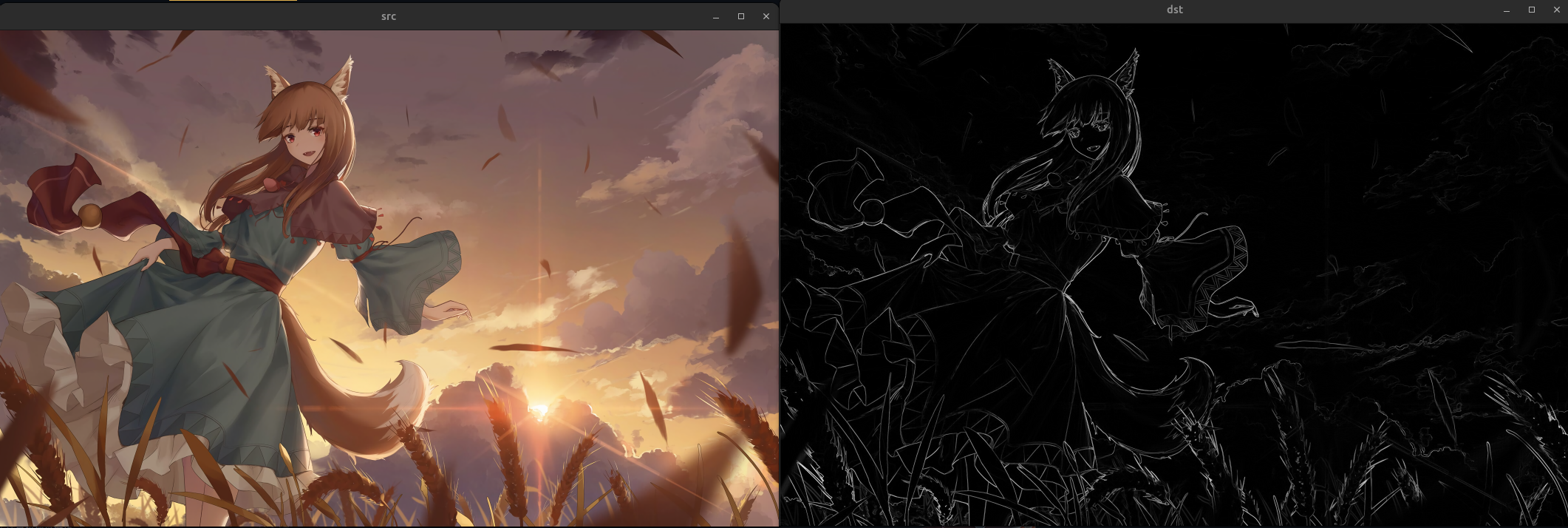
例:使用 Sobel 算子进行边缘检测。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 #include <opencv2/opencv.hpp> int main (int argc, char * argv[]) cv::Mat src = cv::imread (argv[1 ]); cv::Mat dst; cv::Mat gray; cv::Mat grad_x, grad_y; cv::Mat abs_grad_x, abs_grad_y; cv::cvtColor (src, gray, cv::COLOR_BGR2GRAY); cv::Sobel (gray, grad_x, CV_16S, 1 , 0 , 3 ); cv::Sobel (gray, grad_y, CV_16S, 0 , 1 , 3 ); cv::convertScaleAbs (grad_x, abs_grad_x); cv::convertScaleAbs (grad_y, abs_grad_y); cv::addWeighted (abs_grad_x, 0.5 , abs_grad_y, 0.5 , 0 , dst); cv::namedWindow ("src" , cv::WINDOW_NORMAL); cv::namedWindow ("dst" , cv::WINDOW_NORMAL); cv::imshow ("src" , src); cv::imshow ("dst" , dst); cv::waitKey (0 ); return 0 ; }
sobel 算子是一种有限差分算子,相同的有限差分算子还有 Prewitt、Roberts、Scharr 等。
Prewitt
Roberts
Scharr
不仅有水平和垂直方向的,还有对角方向的。
拉普拉斯算子 拉普拉斯算子是一种二阶微分算子,可以检测图像中的边缘。
其数学表达式为:
由上式我们可以得到拉普拉斯算子的卷积核:
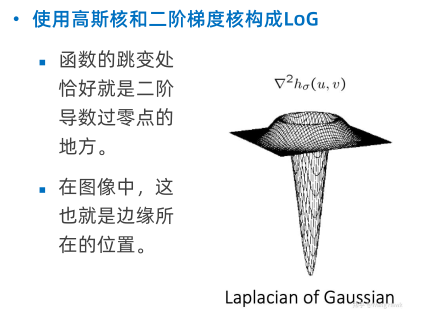
DoG & LoG DoG(Difference of Gaussian)是高斯滤波的差分,指的是先对图像进行两次高斯滤波,然后再求差分。
LoG(Laplacian of Gaussian)是高斯滤波的拉普拉斯,指的是先对图像进行高斯滤波,然后再求拉普拉斯。
卷积的微分定理
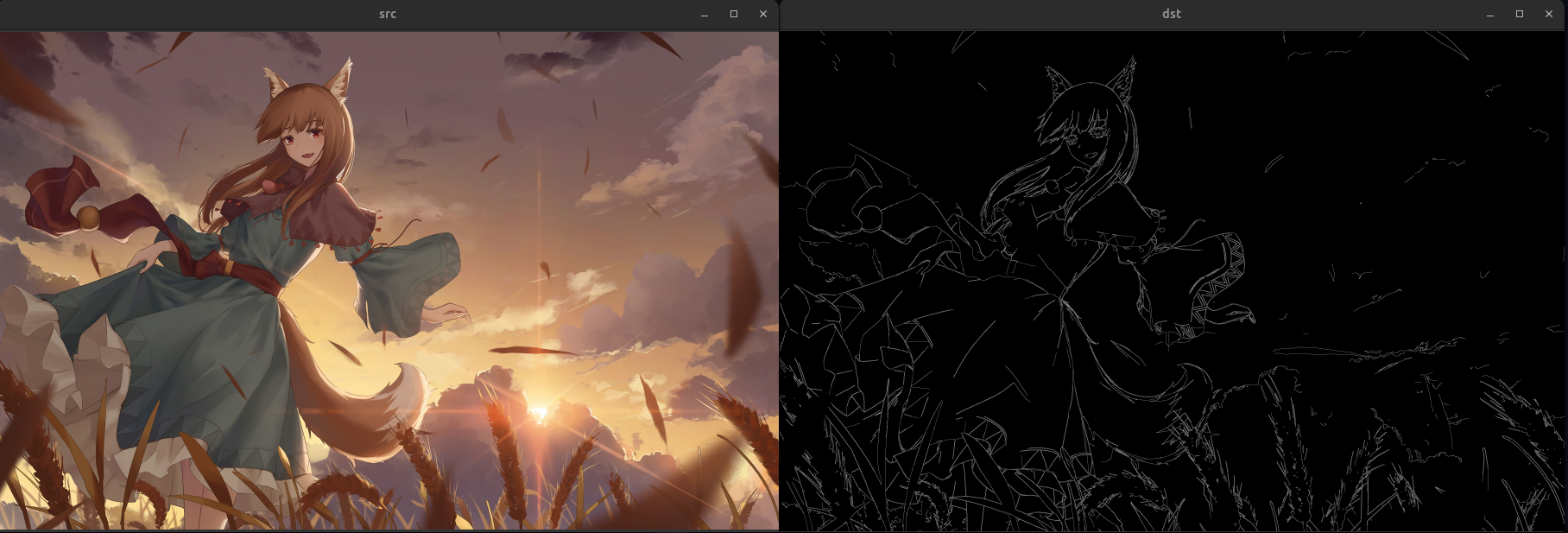
Canny 边缘检测 Canny 边缘检测是一种多步骤的边缘检测算法,它包括以下几个步骤:
高斯滤波:减少噪声 梯度计算:计算图像的梯度 非极大值抑制:抑制非边缘像素 迟滞阈值化:确定边缘 例:用 Canny 算子进行边缘检测。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 #include <opencv2/opencv.hpp> int main (int argc, char * argv[]) cv::Mat src = cv::imread (argv[1 ]); cv::Mat dst; cv::Mat gray; cv::cvtColor (src, gray, cv::COLOR_BGR2GRAY); cv::Canny (gray, dst, 50 , 150 ); cv::namedWindow ("src" , cv::WINDOW_NORMAL); cv::namedWindow ("dst" , cv::WINDOW_NORMAL); cv::imshow ("src" , src); cv::imshow ("dst" , dst); cv::waitKey (0 ); return 0 ; }
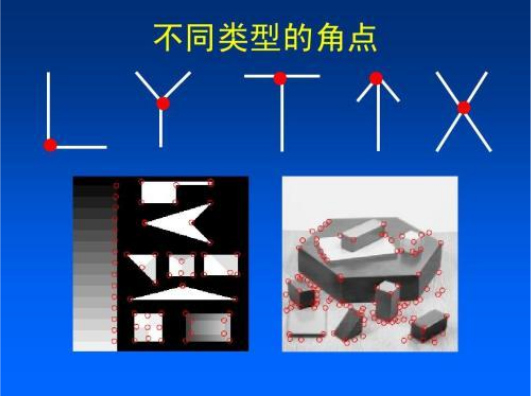
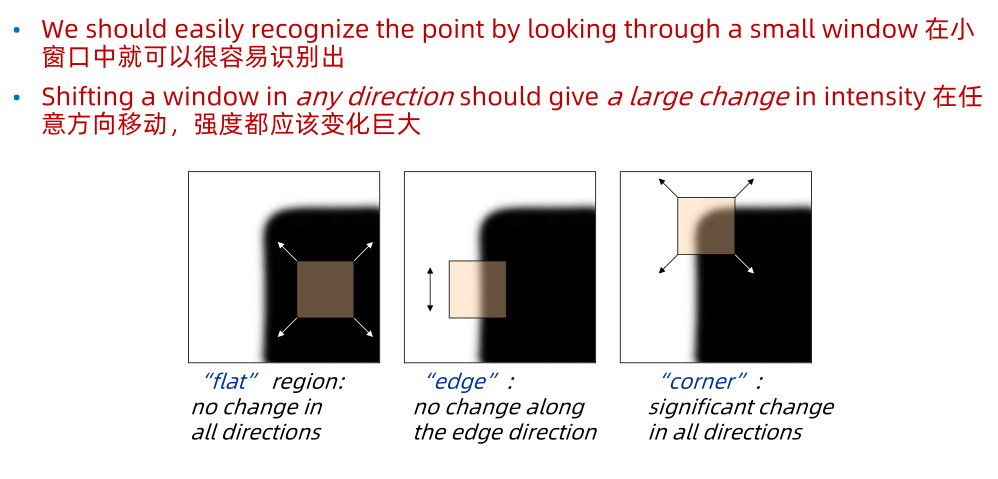
角点检测 角点是图像中的一种特殊的特征点,它是图像中的局部最大值,可以用来进行图像配准、目标跟踪等。
Harris 角点检测 Harris 角点检测是一种常用的角点检测算法,它是一种基于图像灰度的角点检测算法。
其表达矩阵可借助图像中的局部模板里两个方向梯度来定义,一种常见的表达矩阵为:
其中,
将矩阵
则角点响应函数为:
其中,
Harris 角点检测算法的步骤如下:
计算图像的局部梯度 局部图像梯度减去均值 计算协方差矩阵 计算特征值和特征向量 利用阈值筛选角点 例:使用 Harris 角点检测算法检测角点。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 #include <opencv2/opencv.hpp> int main (int argc, char * argv[]) cv::Mat src = cv::imread (argv[1 ]); cv::Mat dst; cv::Mat gray; cv::Mat dst_norm, dst_norm_scaled; cv::cvtColor (src, gray, cv::COLOR_BGR2GRAY); cv::cornerHarris (gray, dst, 2 , 3 , 0.04 ); cv::normalize (dst, dst_norm, 0 , 255 , cv::NORM_MINMAX, CV_32FC1, cv::Mat ()); cv::convertScaleAbs (dst_norm, dst_norm_scaled); for (int i = 0 ; i < dst_norm.rows; i++) { for (int j = 0 ; j < dst_norm.cols; j++) { if ((int )dst_norm.at <float >(i, j) > 100 ) { cv::circle (src, cv::Point (j, i), 5 , cv::Scalar (0 , 0 , 255 ), 2 , 8 , 0 ); } } } cv::namedWindow ("src" , cv::WINDOW_NORMAL); cv::imshow ("src" , src); cv::waitKey (0 ); return 0 ; }
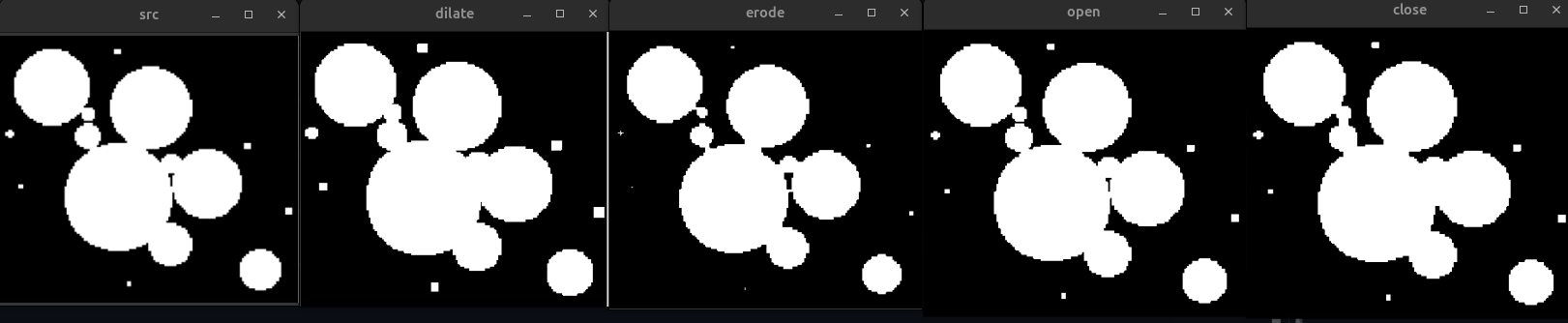
形态学 主要用于图像的形状分析、特征提取等。
膨胀与腐蚀 膨胀与腐蚀是形态学中的两种基本操作,它们可以用于图像的去噪、分割等。
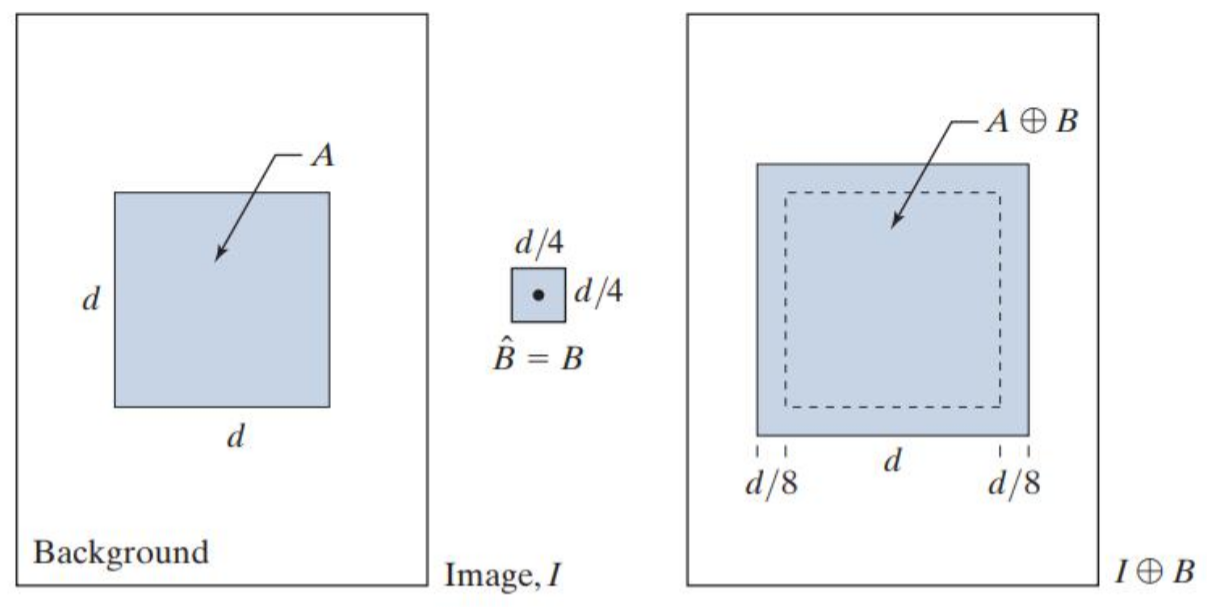
膨胀
可以使图像中的物体变大,或者连接两个物体。
其中,
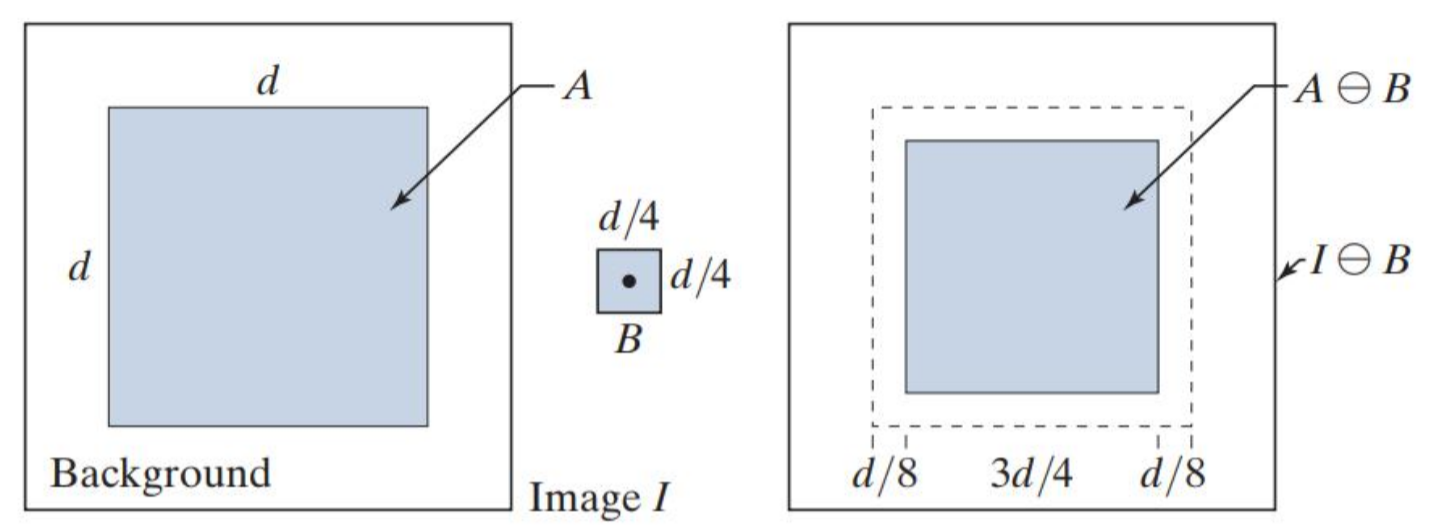
腐蚀
可以使图像中的物体变小,或者分割两个物体。
其中,
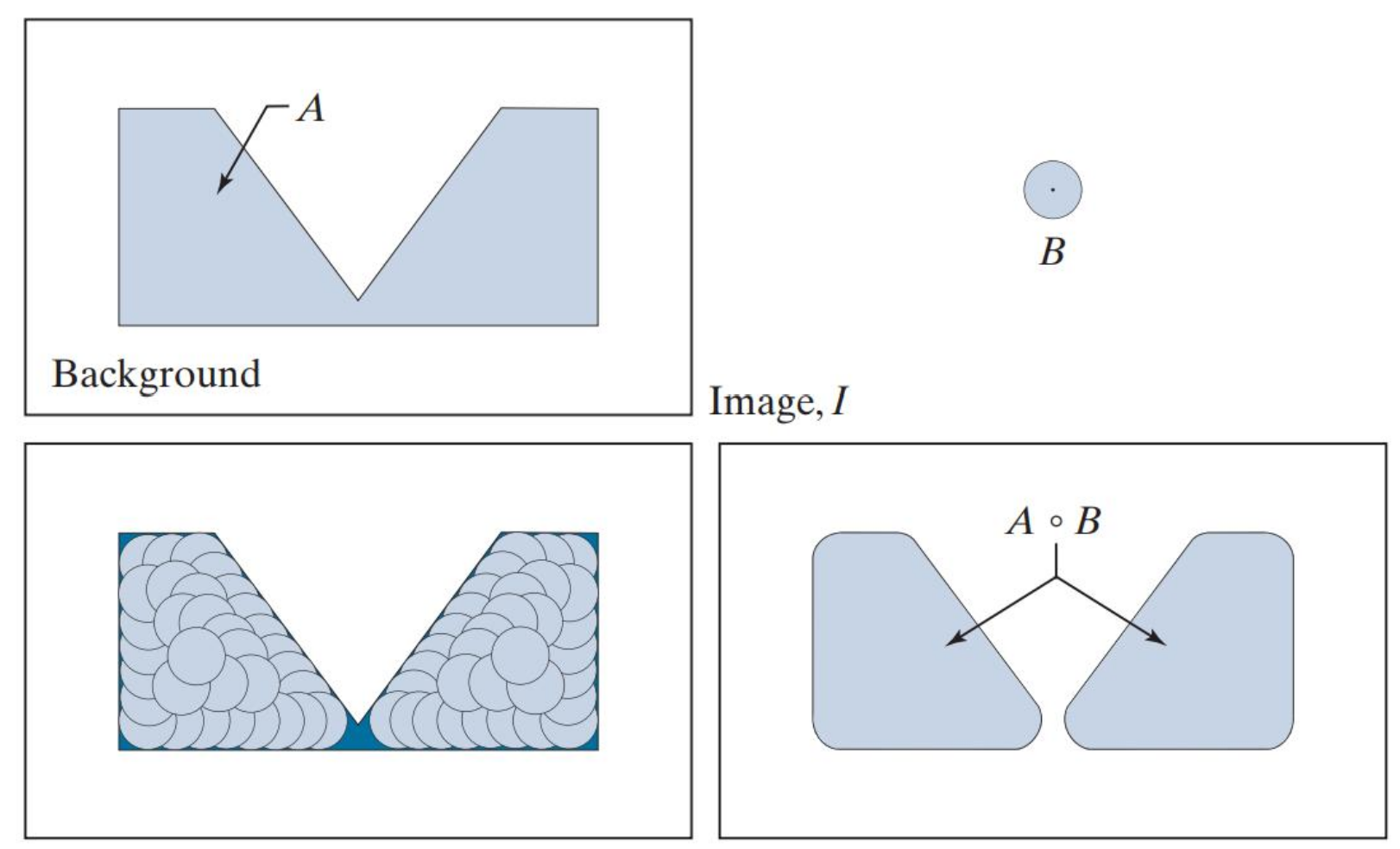
开运算与闭运算 开运算
先腐蚀后膨胀,可以去除小的噪声。
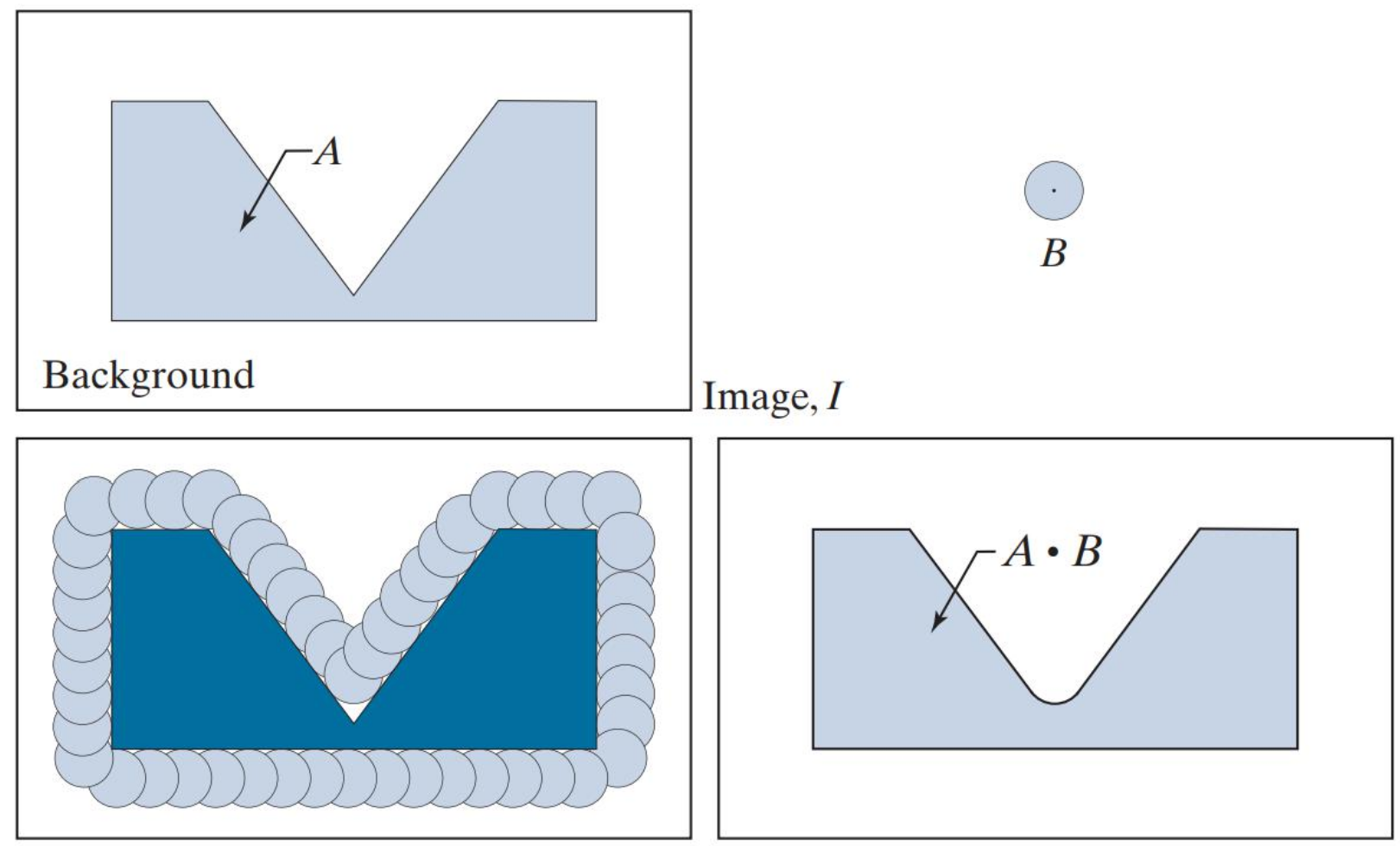
闭运算
先膨胀后腐蚀,可以填充小的空洞。
例:使用形态学操作进行图像处理。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 #include <opencv2/opencv.hpp> int main (int argc, char * argv[]) cv::Mat src = cv::imread (argv[1 ]); cv::Mat dst; cv::Mat gray; cv::Mat element = cv::getStructuringElement (cv::MORPH_RECT, cv::Size (5 , 5 )); cv::cvtColor (src, gray, cv::COLOR_BGR2GRAY); cv::threshold (gray, gray, 100 , 255 , cv::THRESH_BINARY); cv::namedWindow ("src" , cv::WINDOW_NORMAL); cv::namedWindow ("dilate" , cv::WINDOW_NORMAL); cv::namedWindow ("erode" , cv::WINDOW_NORMAL); cv::namedWindow ("close" , cv::WINDOW_NORMAL); cv::namedWindow ("open" , cv::WINDOW_NORMAL); cv::imshow ("src" , src); cv::morphologyEx (gray, dst, cv::MORPH_DILATE, element); cv::imshow ("dilate" , dst); cv::morphologyEx (gray, dst, cv::MORPH_ERODE, element); cv::imshow ("erode" , dst); cv::morphologyEx (gray, dst, cv::MORPH_CLOSE, element); cv::imshow ("close" , dst); cv::morphologyEx (gray, dst, cv::MORPH_OPEN, element); cv::imshow ("open" , dst); cv::waitKey (0 ); return 0 ; }